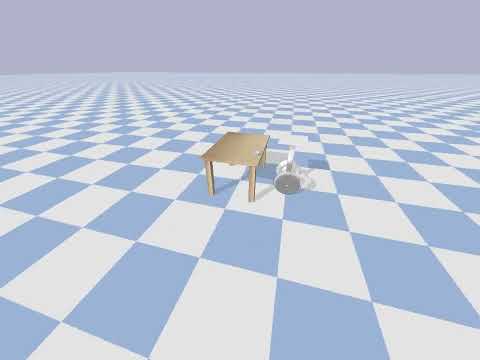
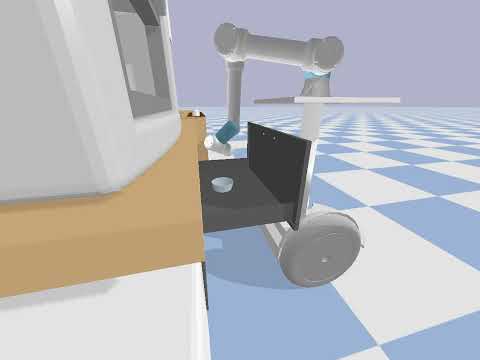
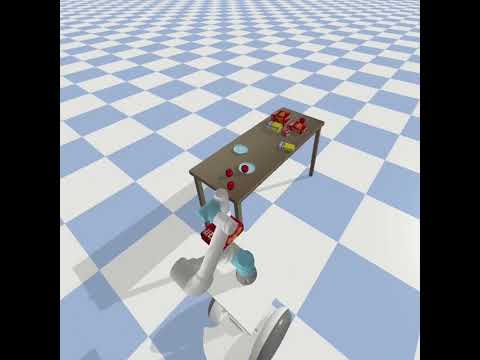
BestMan robot consists of a mobile base (i.e., SegBot) and an arm (i.e., UR5e), which is with a few basic capabilities, such as navigation and pick-place.
|
|
|
Preparation & APIs
Here, we introduce how to configure
pybullet-based simulation environment.
🔥Please refer to the github
project.
